
Motocykl bez wózka bocznego, stojący tylko na dwóch kołach, niczym nie podparty, jest bryłą zupełnie niestabilną. Nikogo nie .trzeba przekonywać, że nawet najstaranniej ustawiony w pionie i pozostawiony tak samemu sobie, przewróci się natychmiast, gdy tylko zabierzemy podtrzymującą go rękę.
Na skróty:
Wychylenie wańki-wstańki z pionowej pozycji powoduje podniesienie jej środka masy (Rys. 1). Dlatego powraca ona samoczynnie do pionowego położenia, a my mówimy o „równowadze stałej”. W takiej bryle jak motocykl sytuacja jest odwrotna: po wychyleniu z pionu środek masy opada, a motocykl upada. To się nazywa „równowagą chwiejną”. A dlaczego w czasie jazdy pojawia się jednak równowaga, i to taka, że żeby ją zaburzyć, trzeba dopiero zrobić trochę głupstw?

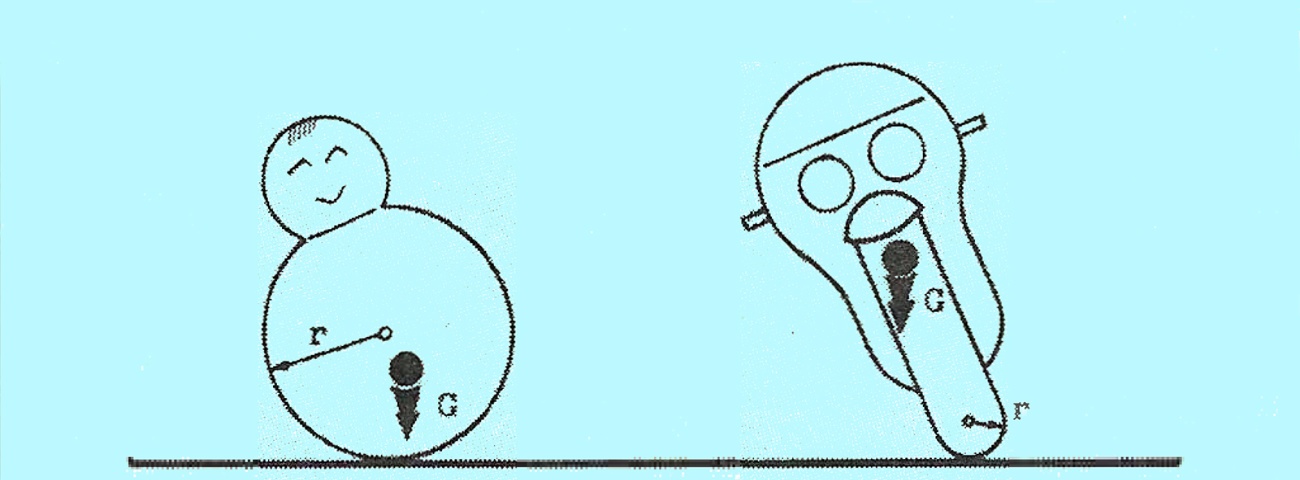
Rys.1


Motocykl poruszający się po linii ściśle prostej podlega równowadze tak samo chwiejnej, jak motocykl na postoju. Tu już poglądowy dowód jest trudniejszy, bo trudno kogoś namawiać, żeby w czasie jazdy „po prostej”, a więc przy jakiejś już szybkości, zablokował sobie kierownicę. I to nie zaciśnięciem amortyzatora skrętu, lecz zablokowaniem „na amen”, przypuśćmy jakimś sworzniem w ściśle pasowane otwory. Wtedy jazda byłaby rzeczywiście ściśle na wprost, a upadek natychmiastowy.
Motocykl w czasie jazdy nie przewraca się tylko dlatego, że właśnie nigdy nie jeździ po idealnej prostej. Gdy tylko zacznie chylić się w którąś stronę, musi pojawić się równie początkowy skręt przedniego koła w stronę początkowego nachylenia. Wywoła on siłę odśrodkową, która przywróci motocykl do położenia pionowego. Samoczynny skręt musi samoczynnie zaniknąć, gdy tylko motocykl wróci do pionu. Ten cykl będzie się powtarzał w jedną bądź w drugą stronę.

Rys.2
Stabilność motocykla (Rys. 2) w czasie jazdy polega na tym, że porusza się on między dwiema potencjalnie działającymi siłami odśrodkowymi. Potencjalnie znaczy to, że pojawiają się one dopiero wówczas, gdy motocykl zaczyna wychylać się ze swego właściwego położenia. I muszą natychmiast znikać, gdy motocykl wraca do poprzedniego położenia. Właściwe położenie to takie, które przy jeździe na wprost oznacza pionową pozycję. I to działa! Prawie bez ingerencji kierowcy. W każdym razie: bez świadomej ingerencji.

Jak to działa?
Omówimy to na klasycznym, widelcowym zawieszeniu, a później postaramy się ocenić, jak to się odnosi do zapowiadanych, a częściowo już zrealizowanych „zwrotnicowych” czy jak kto woli, „bezwidelcowych”, systemów.

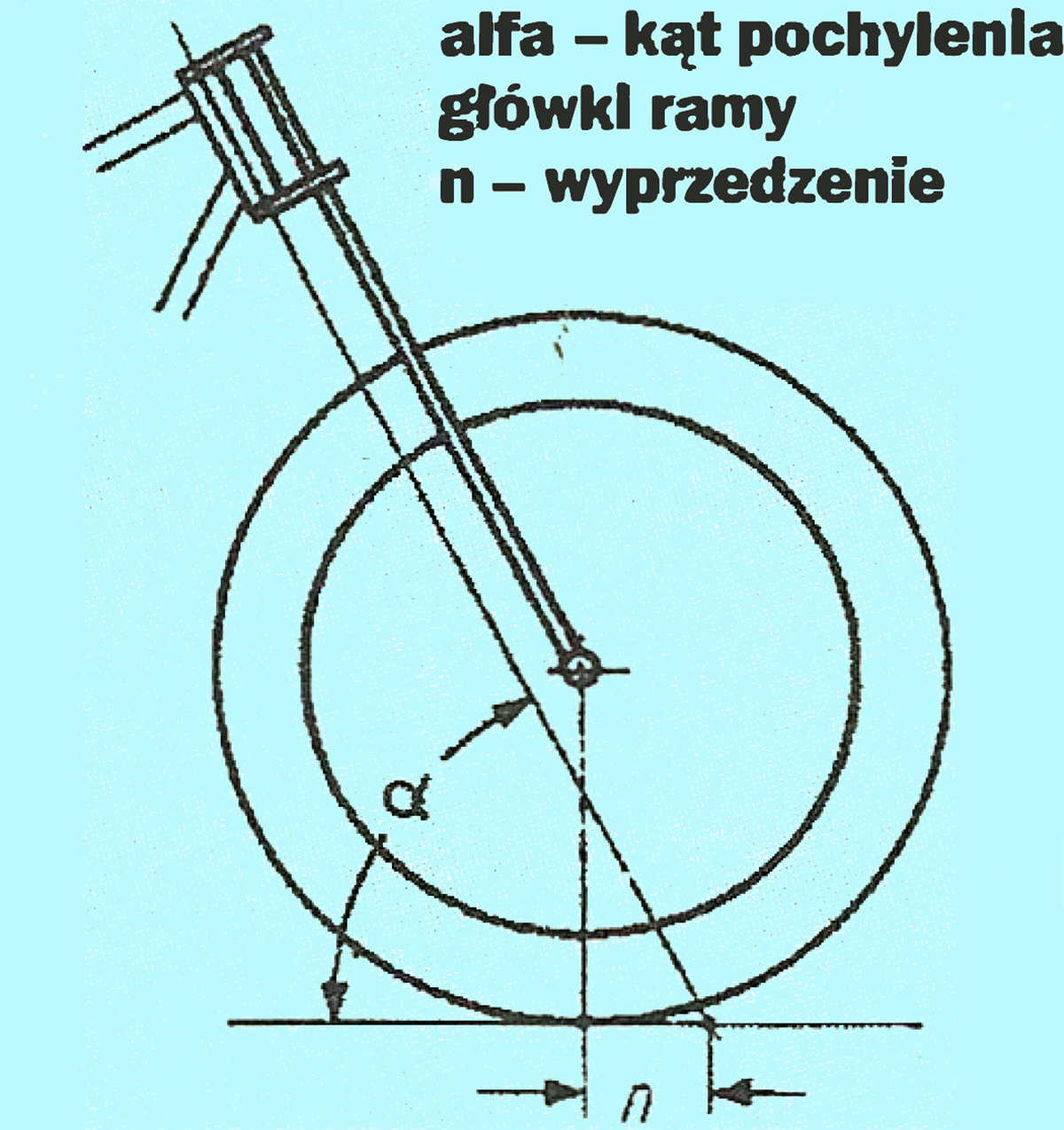
Rys. 3
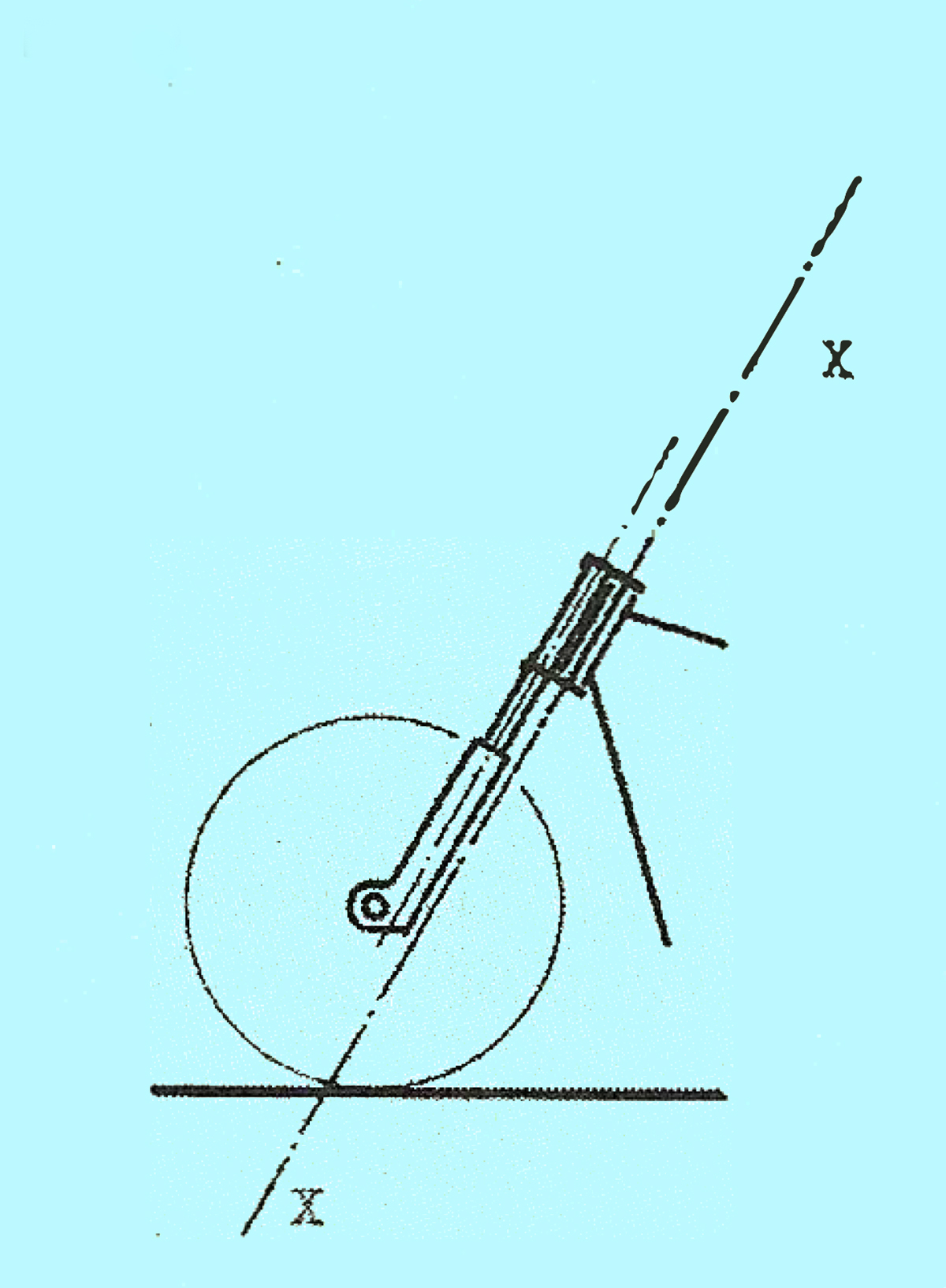
Ziemia wywiera reakcję na tę część masy motocykla, jaka przypada na przednie koło (Rys. 3). Ta siła, działająca pionowo w górę, w czasie gdy motocykl zacznie się chylić w którąś stronę, na ramieniu wynikającym z wielkości wyprzedzenia „n” i kąta nachylenia widelca, skręca koło w stronę zaistniałego nachylenia motocykla.
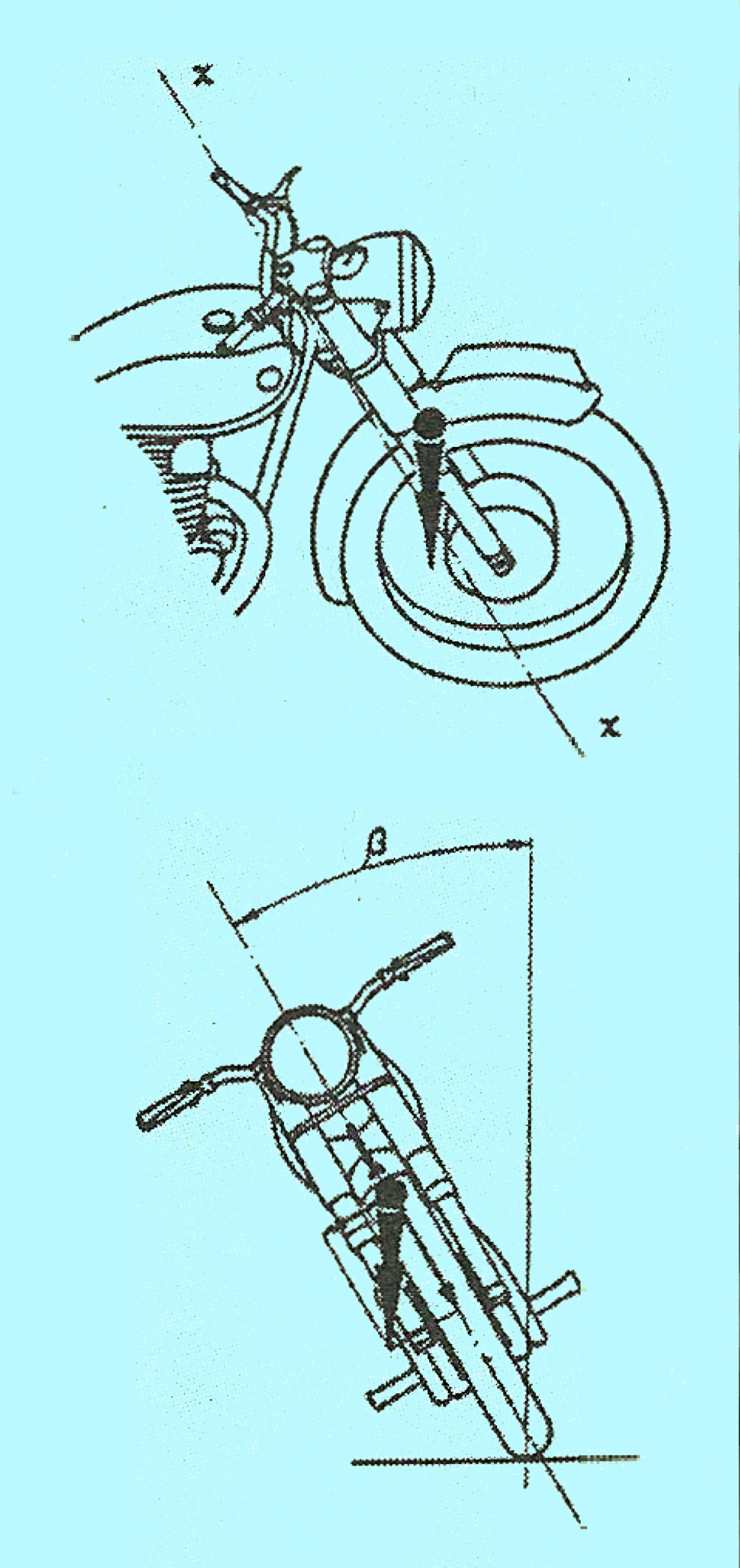
Jednocześnie ciężar przedniego kola i wszystkiego, co jest z nim związane: błotnik, hamulec, widelec, kierownica, lampa, itd., wyobrażany przez silę ciążenia skupioną w środku masy układu sterowego, również powoduje skręt koła w stronę zaistniałego nachylenia (Rys. 4). Tym bardziej, im cięższy jest układ sterowy i im jego środek masy jest bardziej odsunięty w przód (ponad!) oś X-X.
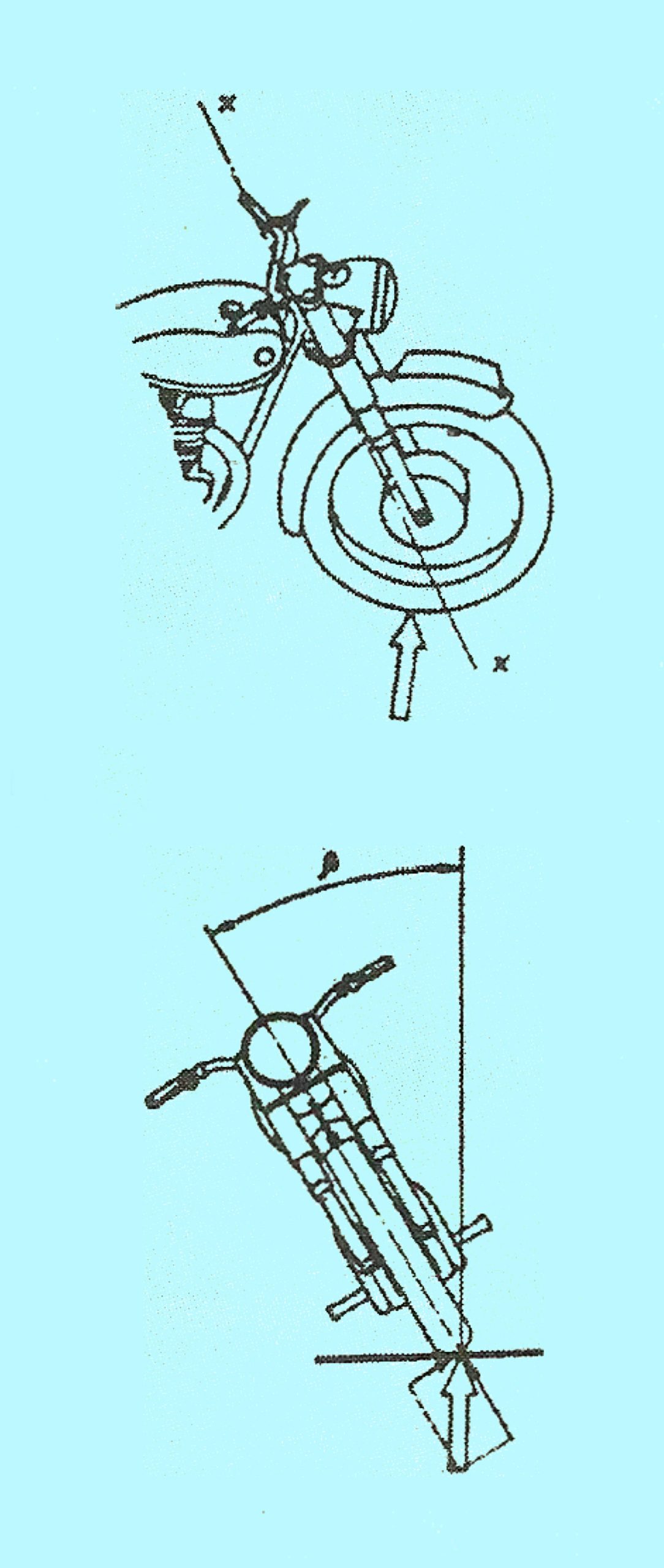
Rys. 5
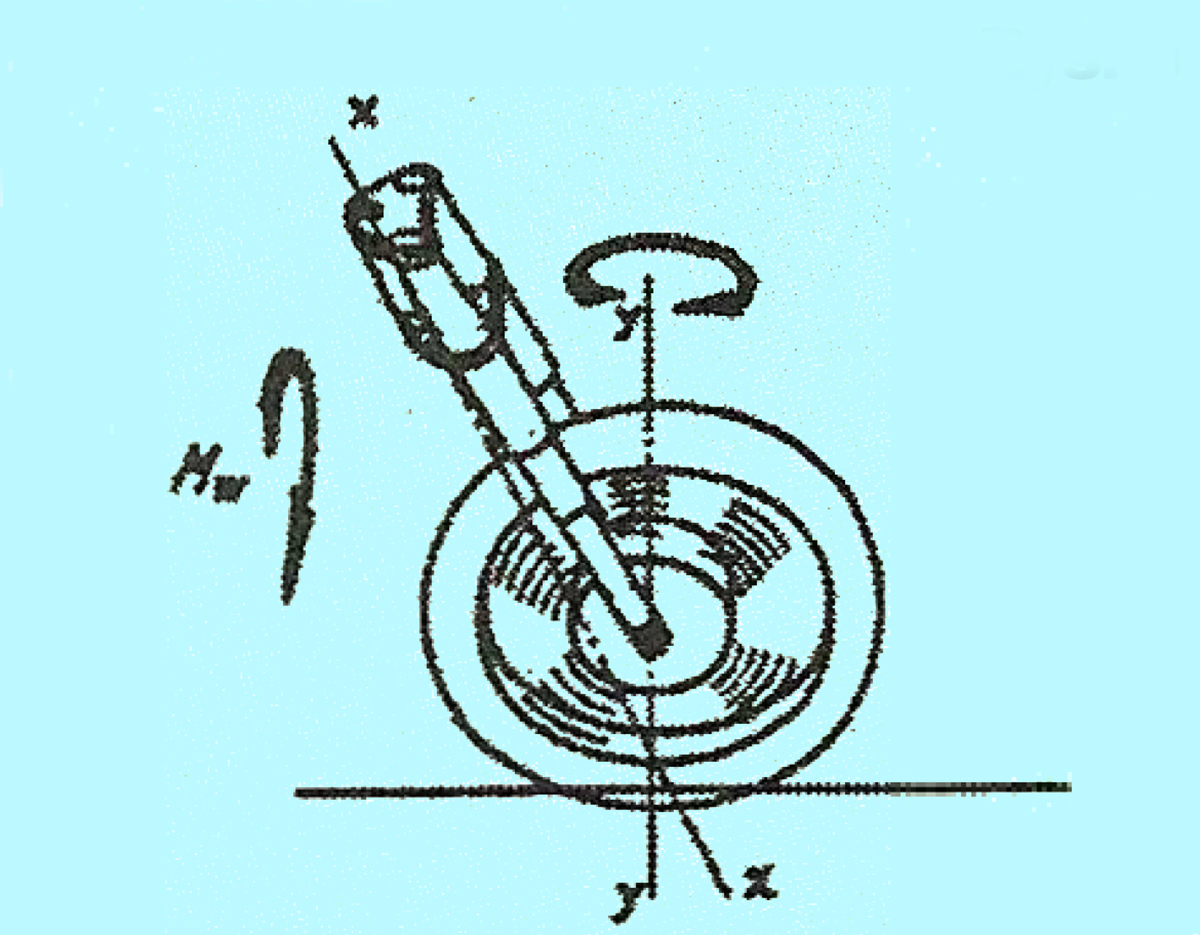
Chylący się motocykl pociąga za sobą także wirujące przednie koło (Rys. 5). Zasługą zjawiska precesji jest to, że momentowi wymuszającemu to nachylenie przedniego koła Mw towarzyszy moment skręcający koło wokół pionowej osi Y-Y. Takiej osi nie ma w motocyklu, więc koło skręca się wokół pochyłej osi X-X. Dobrze się składa, że precesja działa właśnie we właściwym kierunku – w stronę zaistniałego nachylenia.
Rys. 6
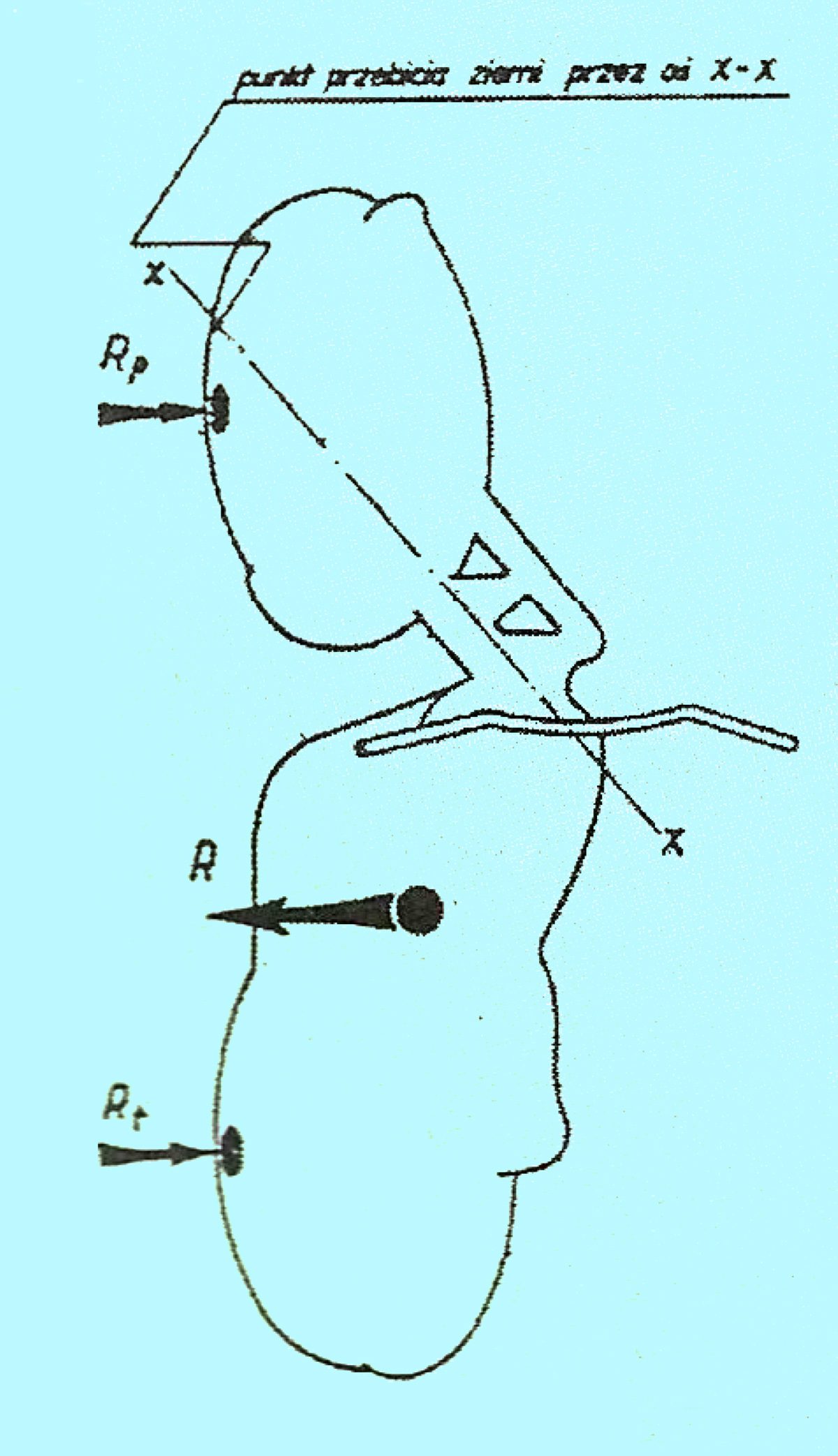
Siła odśrodkowa (Rys. 6) podnosi motocykl z nachylenia, przeważywszy działanie wynikające z utraty jego równowagi chwiejnej. Sile odśrodkowej towarzyszą poziome siły reakcji Rp na przednim kole i Rt na tylnym. Siła reakcji działająca na przednie koło za osią główki ramy powoduje powrót przedniego koła do pozycji na wprost. Precesja w powrotnym ruchu też działa we właściwym kierunku: pomaga wyprostować koło.
Sprawa proporcji
Tak więc trzy czynniki decydują o zachowaniu się przedniego koła, które zapewnić musi optimum stabilności i sterowności – geometria przedniego widelca, z jej głównymi czynnikami: wielkością wyprzedzenia i kątem nachylenia osi główki ramy – masa widelca i oddalenie jej środka w przód od osi główki ramy – efekt żyroskopowy kół, działający poprzez „precesję”, która związana jest z „momentem bezwładności” przedniego koła, w głównej mierze zależnym od jego średnicy. Wydaje się bezdyskusyjnym stwierdzenie, że im większa szybkość obrotowa koła, tym większy jego efekt żyroskopowy, a więc, że małe przednie koła, obecnie znów spotykane w motocyklach, z punktu widzenia sterowności nadają się raczej do szybkich maszyn szosowych niż do terenowych. I tak są stosowane.
Chodzi teraz o to, że te trzy elementy sterowności motocykla muszą być harmonijnie zgrane, jeżeli mają łącznie dać dobry efekt. Przednie zawieszenie motocykla jest typowym przykładem na to, że nie zawsze „im więcej, tym lepiej”.
Masa widelca, jeżeli jest zbyt wysunięta w przód w stosunku do osi widelca, daje złą sterowność. Przy wejściach w zakręt odczuwa się ją jako czynnik zbytnio ciągnący kierownicę w stronę zakrętu. Trzeba rękami wyraźnie powstrzymywać od samoczynnego zbyt dużego skrętu. Była to typowa wada widelców trapezowych, zwanych z angielska ,,girder forks”.
Rys. 7
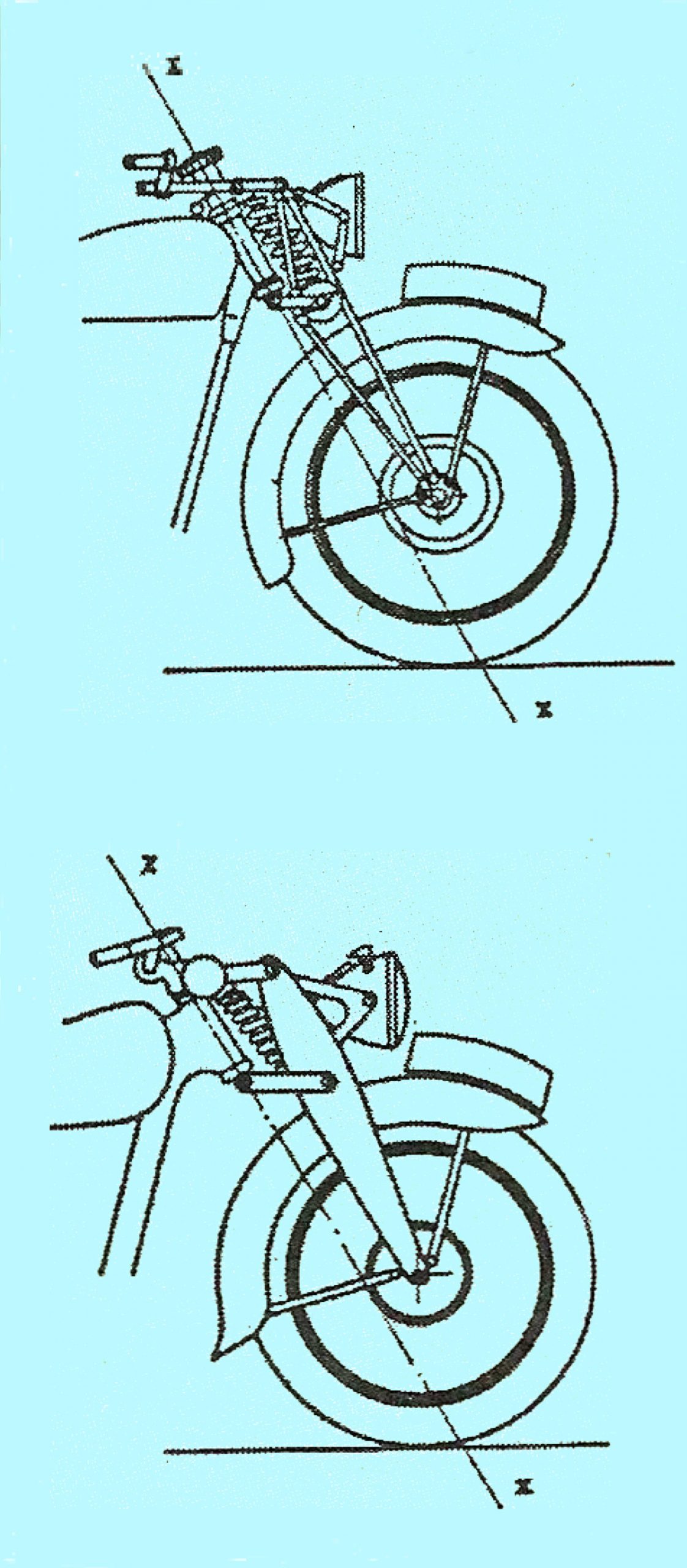
Zarówno lżejszy i na krótkich wahaczach przysunięty bliżej do główki ramy angielski widelec trapezowy (Rys. 7), jak i typowy niemiecki widelec, cięższy i bardziej wysunięty w przód, nie dawały naprawdę dobrych własności sterowności. Efekt zbyt dużego ciężaru układu sterowego był wyczuwalny, choć oczywiście w różnym stopniu. Rozłożenie mas wszystkich elementów związanych z układem sterowym (reflektor, błotnik, szybkościomierz i obrotomierz, ewentualnie owiewka i szyba przednia) też ma swój wpływ na sterowność. Tę wadę usunęły widelce teleskopowe, które choć cięższe, miały swój środek masy znacznie bardziej przysunięty bliżej osi główki ramy.

Rys. 8
Zauważmy, że widelce teleskopowe (Rys. 8) w ciężkich motocyklach nie są równoległe do osi X-X. Są one u góry przysunięte do niej, a więc jak gdyby obrócone nieco w tył wokół osi przedniego koła. Przysunąć teleskopu nie można, bo położenie osi wyznaczone jest przez przyjętą przez konstruktora wielkość wyprzedzenia.
Rys. 9
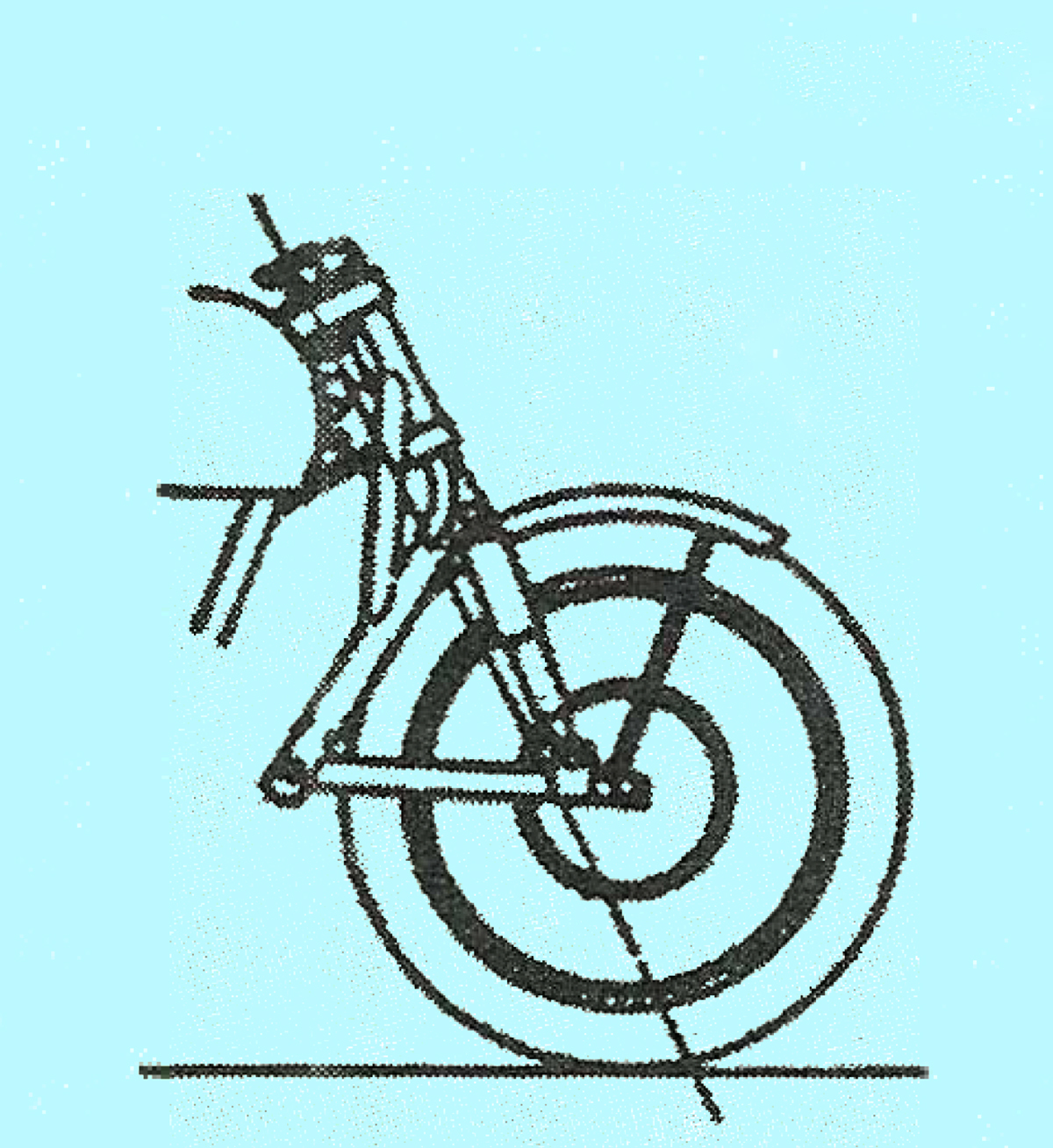
Innym sposobem zmniejszenia efektu ciężaru widelca teleskopowego (Rys. 9) jest równoległe przysunięcie całego widelca w kierunku osi X-X, a dla pozostawienia osi koła we właściwym miejscu, umieszcza się ją mimośrodowo w stosunku do osi teleskopu. Zapoczątkował to Royal Enfield, później zaś wiele firm powtórzyło ten schemat.
Lekkie motocykle, z lekko budowanymi teleskopami, nie wymagały takich finezyjnych rozwiązań i np. w Jawie model J nikt nie narzekał na złą sterowność, choć teleskop był ściśle równoległy do osi główki ramy. To samo dotyczy wielu 125-ek i 175-ek.
Shimmy
Znalezienie właściwego kompromisu w geometrii przedniego widelca jest o tyle ważne, że stabilność i sterowność motocykla zależy tu od pojawienia się i zanikania wzajemnie przeciwstawnych czasem sił. To zawsze grozi wzbudzaniem się drgań harmonicznych. Drgania harmoniczne wokół osi X-X ,,spędzały sen z powiek” niejednemu konstruktorowi. Potocznie miały one nazwę „shimmy”, ale im szybszy był motocykl, tym groźniejsze mogły być skutki tego tańca. Przeżyłem to raz na trapezowym widelcu. Shimmy o dużej częstotliwości dawało „amplitudę” od pełnego do pełnego skrętu w obie strony. Szybkość ok. 60 km/h. Nie chciałbym nigdy doświadczyć tego przy 100 km/h.
Ostatnie rozwiązania z widelcami teleskopowymi zniweczyły ten efekt w takim stopniu, że zaprzestano zaopatrywać te systemy w amortyzator skrętu kierownicy.
Zjawisko „shimmy” zaktualizowało się ponownie w latach 1955-1960, kiedy świat motocyklowy, zniecierpliwiony pewnymi wadami w dziedzinie resorowania, jakie wniósł ze sobą teleskop, usiłował przejść na układ widelca wahaczowego. Ten układ miał umożliwić uwolnienie się od wewnętrznego tarcia, jakie towarzyszy pracy teleskopu. I uwolnił. Ale wahacz łożyskowany poza obwodem koła, a takich rozwiązań było najwięcej, spowodował, że rozbudowany musiał być aż poza koło najcięższy, nośny element widelca.
Rozbudowanie wahaczowego widelca w tył (Rys. 10) spowodowało przemieszczenie środka ciężkości układu sterowego aż poza oś główki ramy, a więc negatywne działanie jednego z czynników sterowności motocykla: ciężaru układu sterowego.
Zaczęto wobec tego rozbudowywać w przód wszystko, co się dało: reflektor z licznikiem itd. Poza tym powiększono radykalnie wyprzedzenie, żeby zwiększyć jego skuteczność wobec negatywnego działania ciężaru układu sterowego. Sprawa się nie udała. Motocyklowy świat wszedł znów w okres groźby „shimmy”.
Okazało się, że właściwego współdziałania nie da się zastąpić zwiększeniem przeciwdziałania jednego z czynników przeciwko dywersji drugiego. Zastosowano znów amortyzator skrętu, tym razem na ogół hydrauliczny, a więc teoretycznie lepszy niż cierny, ale wszelkie opory w układzie sterowym, gdzie w skrajnych warunkach wymaga się wielkiego wyczucia ze strony kierowcy, okazały się niedopuszczalne. Na miękkich gruntach i na śliskich nawierzchniach ich obecność była wyrazme szkodliwa i jazda stawała się znów bardziej niebezpieczna. Pojawiła się tendencja do bocznych uślizgów przedniego kola.
Zresztą, skłonność do „shimmy” wynikła nie tylko ze zmniejszenia efektu ciężaru sterowego aż do wartości ujemnych, lecz także z faktu większego rozrzucenia mas tego układu z dala od osi obrotu: od osi główki ramy. To w fizyce nazywa się „momentem bezwładności” układu względnego osi X-X.
Zdarza się w technice, że nowy system, pojawiający się w aureoli czegoś bardzo nowoczesnego, budzi uśpionego już chochlika. Wahacz w przednim widelcu obudził dawną zmorę: ,,shimmy” (Anglicy nie używali tego angielskiego słowa, lecz mówili o „steering wobble”).
Ujemne działanie ciężaru układu sterowego w wyniku przemieszczania jego środka masy poza oś X-X można łatwo rozpoznać: trzeba motocykl postawić na stojaku centralnym, tak żeby przednie koło oderwało się od nawierzchni. Jeżeli przednie kolo pozostaje stabilne w położeniu na wprost, a wychylone z tego położenia wraca samoczynnie do niego, to oznacza, że środek masy układu sterowego znajduje się poniżej osi główki ramy. Poniżej, tzn. za.
„Zataczanie” się motocykla
Wspomniane na początku tych uwag siły, działające w kierunku pożądanego skrętu przedniego koła w stronę początkowego chylenia się motocykla, a następnie decydujące o powrocie koła do położenia na wprost, gdy motocykl powraca do pionowej pozycji, muszą działać natychmiast w odpowiednim momencie i równie natychmiast zanikać. Tymczasem wszelkie tarcie w układzie skrętu wokół osi główki ramy stara się opóźnić te minimalne ruchy układu sterowego wokół osi X-X aż do momentu, gdy siły będą w stanie to tarcie przezwyciężyć.
Dlatego jazda ze zbyt mocno dociągniętymi łożyskami w główce ramy lub z dociągniętymi amortyzatorami skrętu, zwłaszcza przy małych szybkościach, jest trochę „pijana”: motocykl ma tendencję miarowo kołysać się w lewo i w prawo. Przy wysokich szybkościach zjawisko to nie występuje: precesja obracającego się kola objawia się tak szybko i w tak dużym wymiarze, że opóźnienia w działaniu pozostałych, bardziej statycznych sił, nie dochodzą już do głosu.
Myślę, że z tego powodu nikt nigdy nie usiłował ciernie łożyskować główki ramy. Nigdy do dziś. Dziś cierne łożyskowanie skrętu koła pojawia się w nowych „zwrotnicowych” zawieszeniach. Nie w główce ramy, bo jej nie ma w tych systemach, ale w każdym razie w łożyskowaniu skrętu koła. Bo oś X-X musi pozostać w każdym układzie, niezależnie od tego, co ją wyznacza: główka ramy czy inne elementy zawieszenia. Ciekawe, jak sprawa tego tarcia ujawnia się w praktyce.